认证咨询热线:1897550743315766754503 English

认证咨询热线:1897550743315766754503 English


一、适用范围
本标准适用于工科医机器人,包括但不限于焊接机器人、喷涂机器人、搬运机器人、加工机器人、装配机器人、洁净机器人、医用机器人、教学和实验用机器人等。本标准不适用于无人机、玩具、娱乐机器人等。
1.工业机器人
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3个~6个运动自由度,其中腕部通常有1个~3个运动自由度;驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作;控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
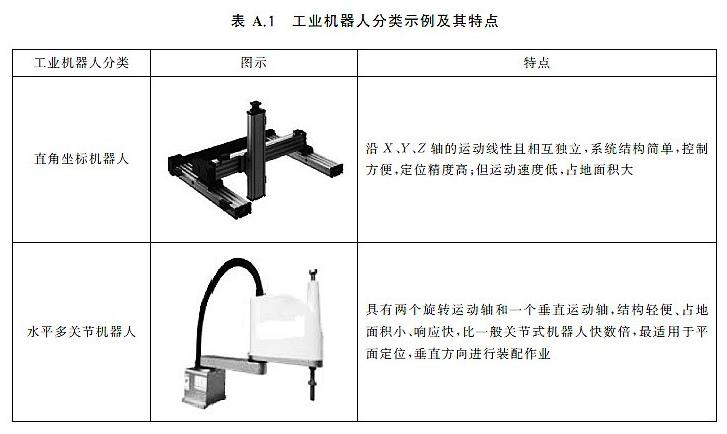
工业机器人按照本身构成可以分为:直角坐标机器人、水平多关节机器人、关节型机器人、柔性机器人、并联机器人、无人搬运车等。工业机器人分类示例及其特点参见表 A.1。

2.医用机器人
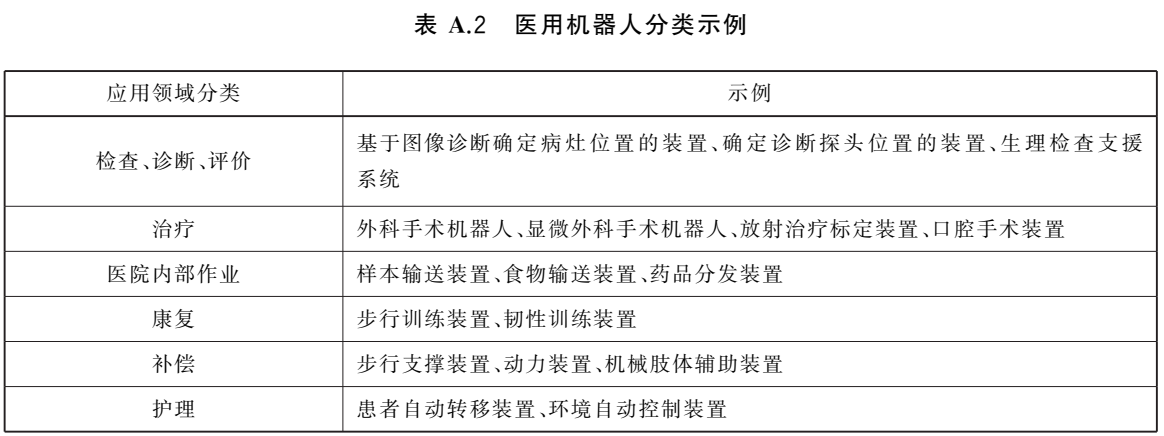
医用机器人是指用于医院、诊所的医疗或辅助医疗的机器人。它能独自编制操作计划,依据实际情况确定动作程序,然后把动作变为操作机构的运动。医用机器人,可识别周围情况及自身———机器人的意识和自我意识,从事医疗或辅助医疗等工作。医用机器人分类示例参见表 A.2。
二、测试模式说明
工科医机器人按其安装方式可分为固定式和移动式,对应的试验运行模式描述如下:
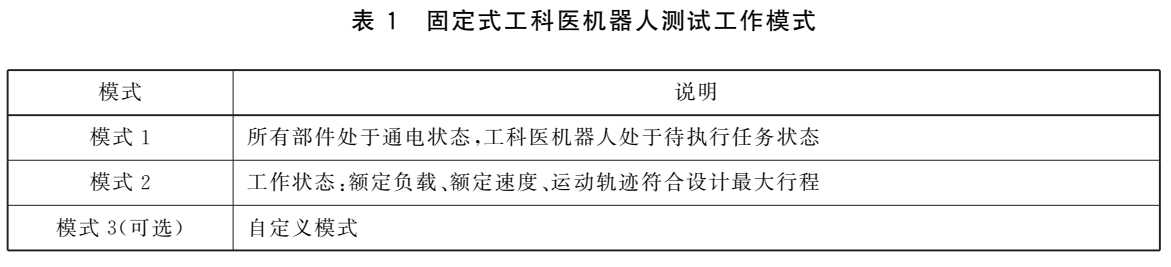
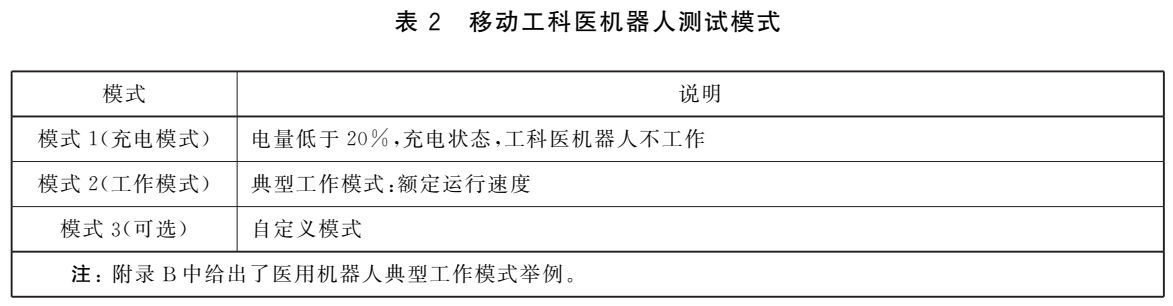
a)固定式工科医机器人
b)移动工科医机器人
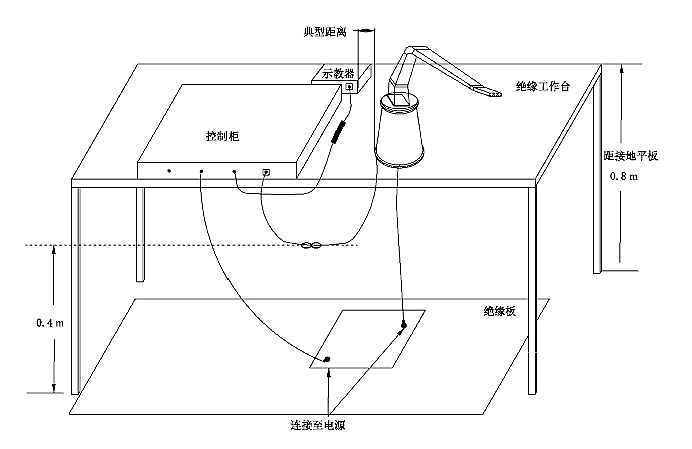
移动工科医机器人应在充电模式和工作模式下分别进行测试。试验模式如表2所示。测试模式的选择应遵循以下原则:
1)如果模式1和模式2不能涵盖最大发射状态,则可选择自定义模式进行测试,自定义模式的状态需要在测试报告中进行描述。
2)工科医机器人在接通电源或充电时可以正常工作,测试模式应在连接电源或充电时按模式2进行。
3)如果工科医机器人在充电和内部电池供电状态下均能正常工作,则应在两种状态的工作模式下进行测试,不需要进行模式1,并在报告中注明具体的工作状态。
三、测试布置
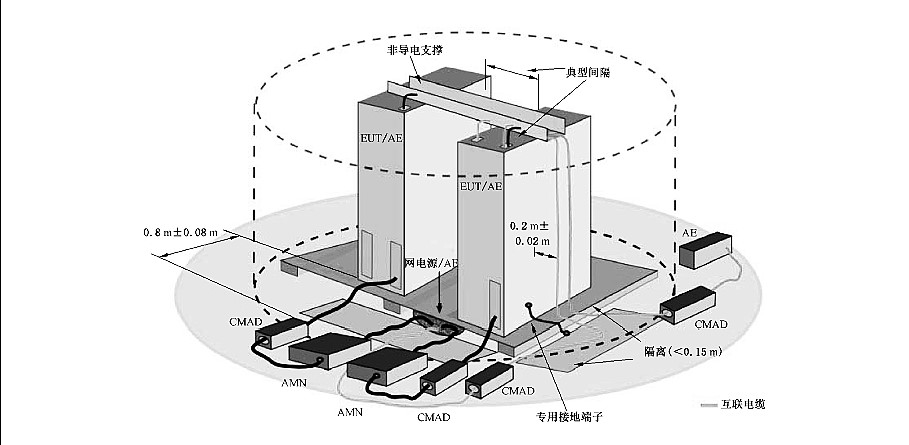
(1)传导测试布置
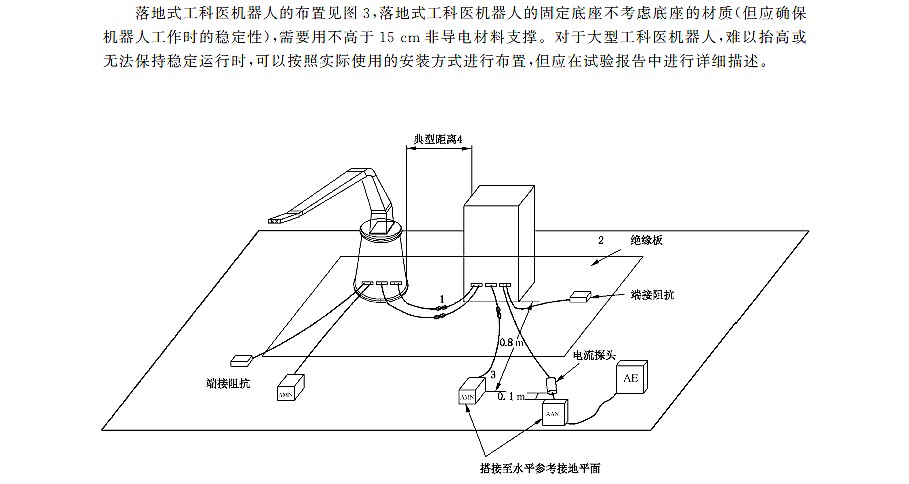
(2)辐射测试布置
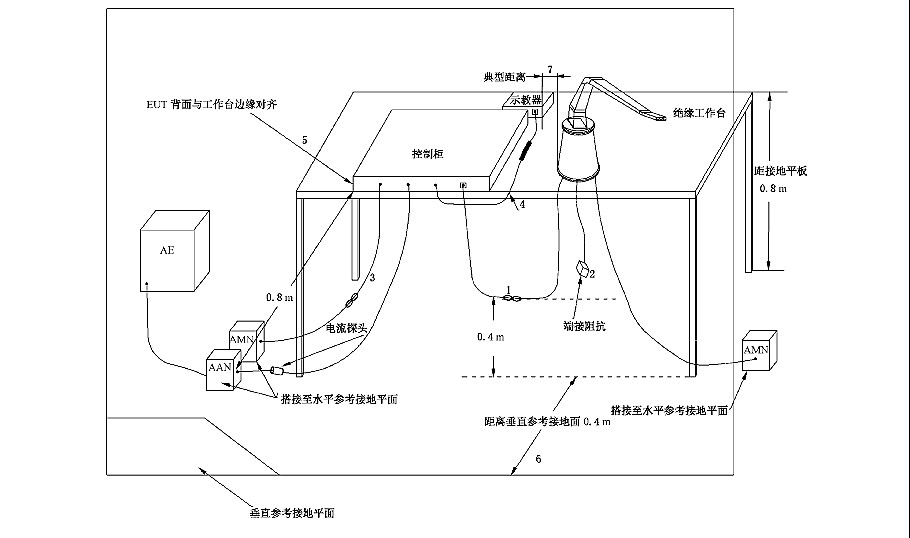
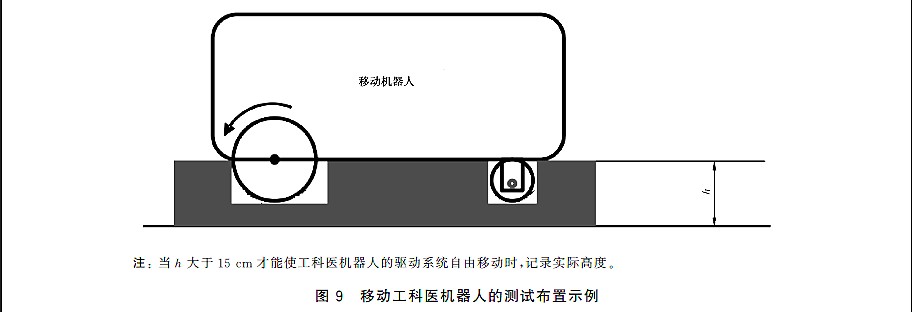
(3)移动式工科医机器人测试布置
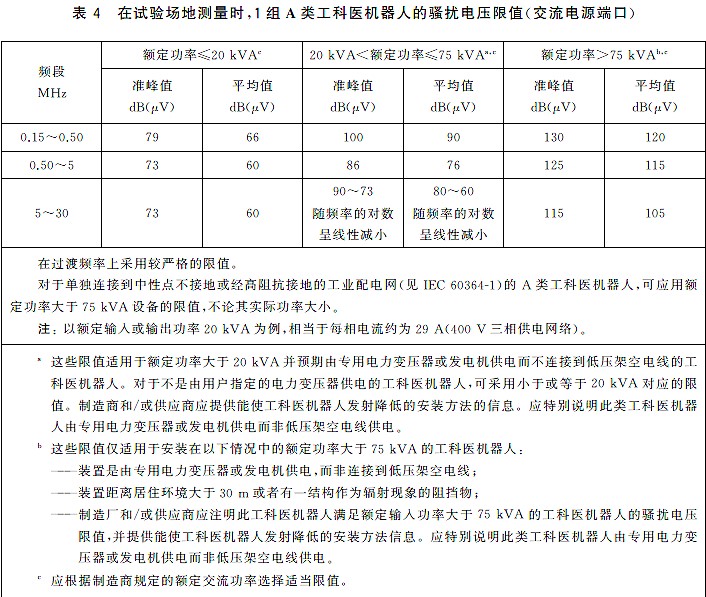
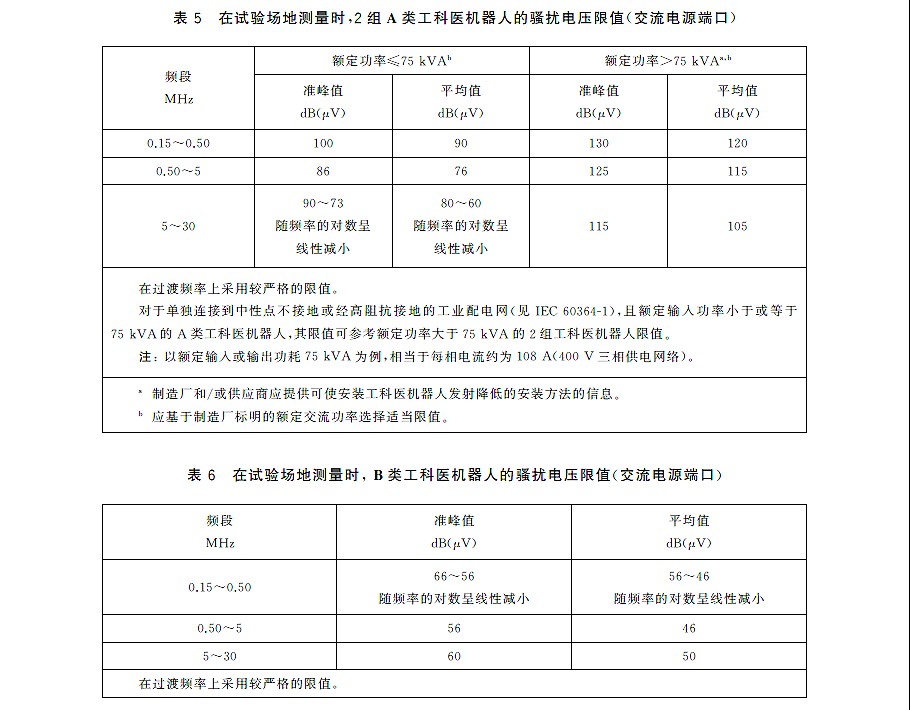
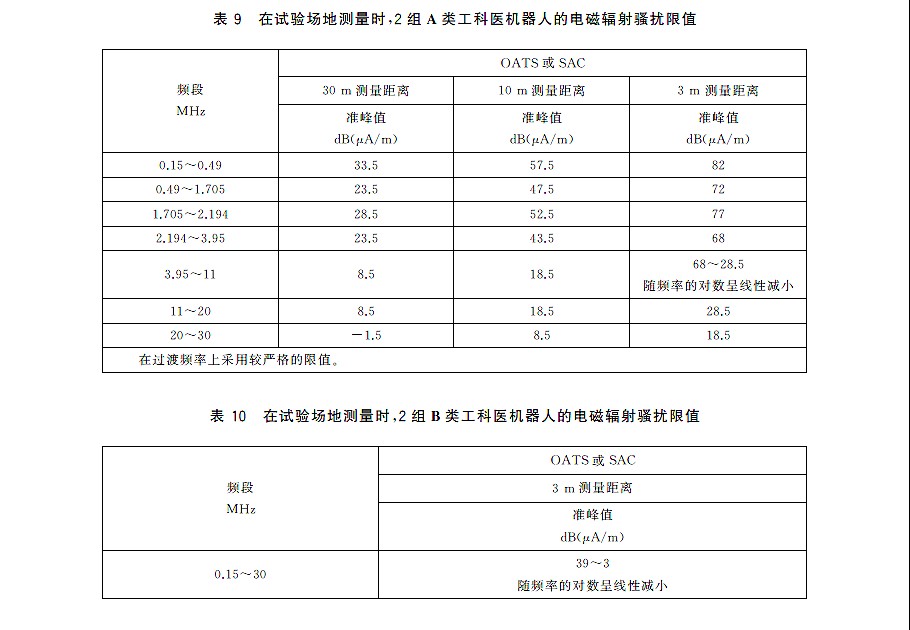
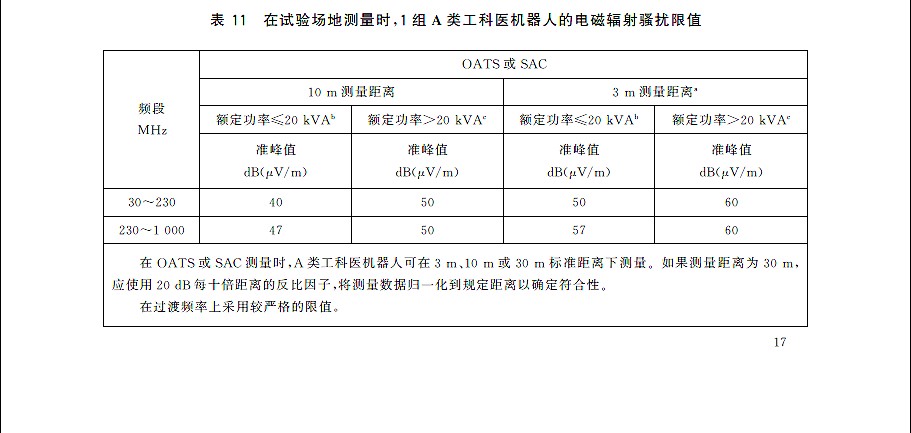
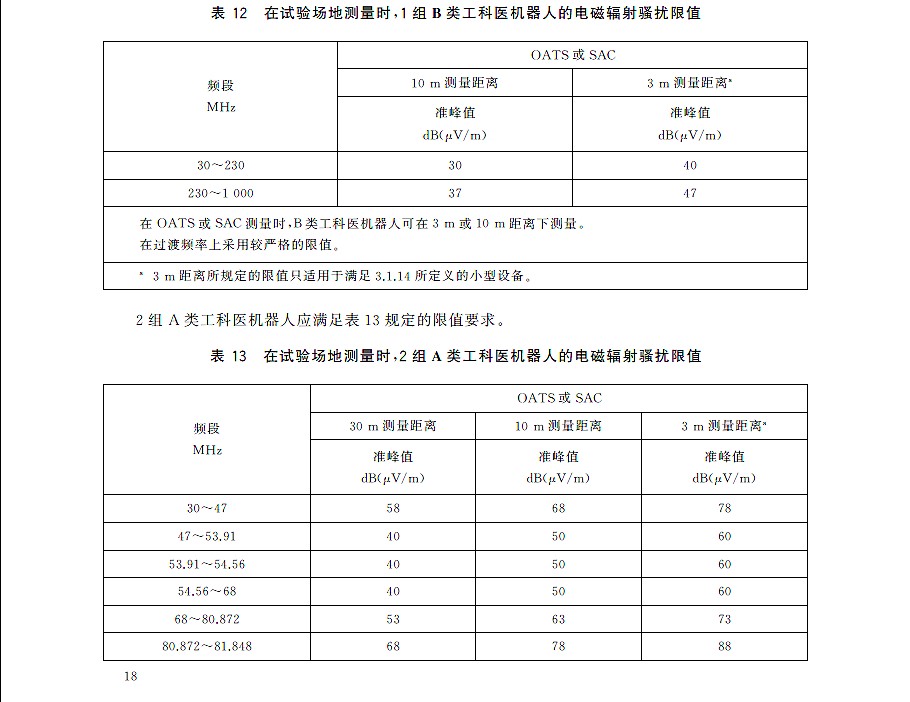
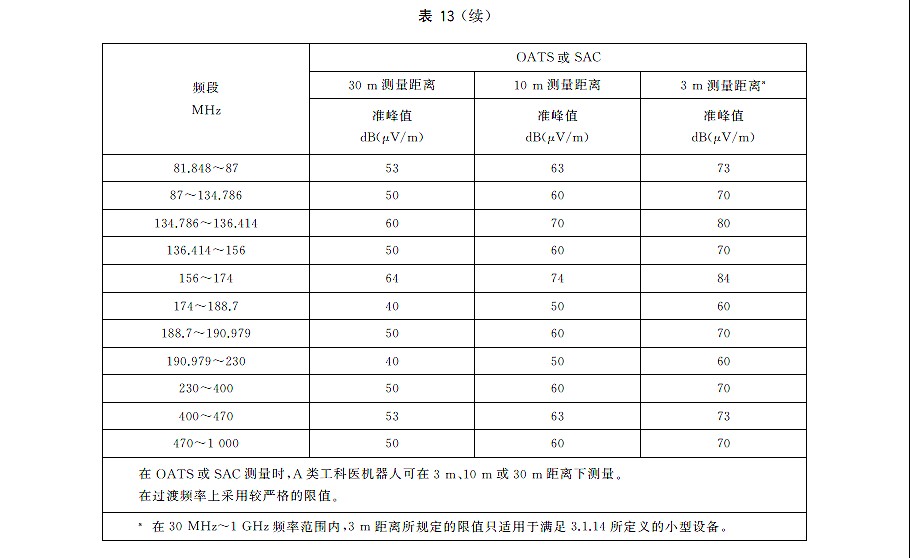
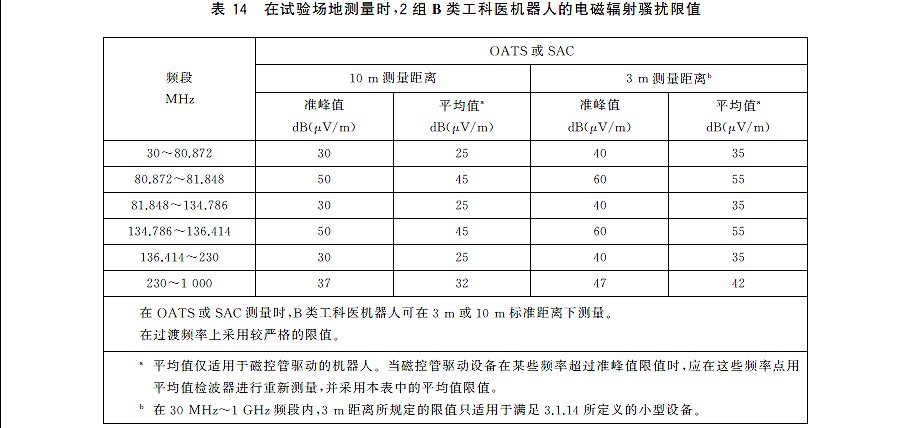
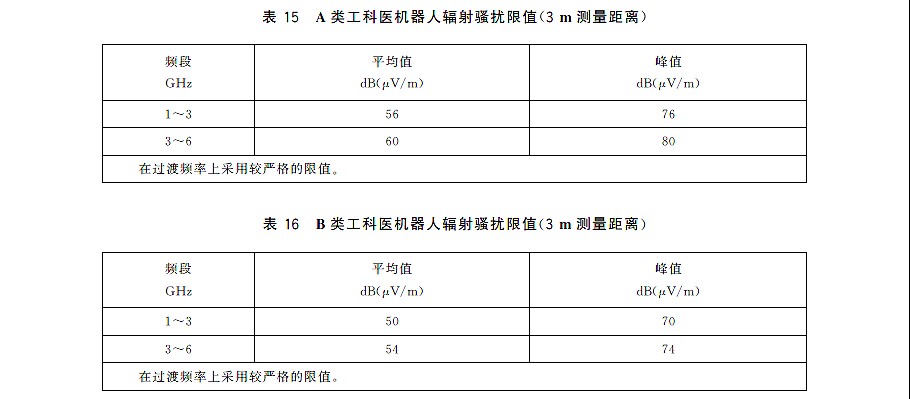
四、测试限值
(2)辐射测试限值
德普华检测集团秉承着“公正、科学、精准、高效”的质量方针,以“品质至上,用心服务”为合作宗旨。立足中国,服务全球,为专业检测、鉴定、测试以及认证的权威机构。


